میکروموبیلیتی، شامل دستگاههایی مانند رباتهای تحویل کالا، اسکوترهای برقی و ویلچرهای هوشمند، به سرعت در حال تغییر شکل حملونقل شهری در مسافتهای کوتاه است. این راهحلهای نوآورانه، که انعطافپذیری بالا و دوستدار محیطزیست بودن را به ارمغان میآورند، جایگزینهای جذابی برای سفرهای کوتاه در مناطق شهری پرتراکم محسوب میشوند. با این حال، علیرغم محبوبیت رو به رشد و مزایای بالقوه فراوان، عمده دستگاههای میکروموبیلیتی همچنان به شدت به کنترل و نظارت انسانی وابسته هستند. این وابستگی نه تنها بهرهوری عملیاتی آنها را محدود میکند، بلکه نگرانیهای جدیتری را در خصوص ایمنی، بهویژه در محیطهای شهری پیچیده و پرتردد که مملو از موانع پویا مانند عابران پیاده، دوچرخهسواران و حتی کودکان بازیگوش هستند، مطرح میسازد. توسعه فناوری خودران برای این دسته از وسایل نقلیه، کلید باز کردن پتانسیل کامل آنها در بهبود کیفیت زندگی شهری و کاهش ترافیک است.
نیاز مبرم به میکروموبیلیتی خودران در فضاهای شهری پیچیده
روشهای حملونقل سنتی مانند خودروها و اتوبوسها با وجود کارایی در سفرهای طولانی، اغلب در فراهم آوردن اتصال “مایل آخر” — بخش حیاتی و نهایی سفرهای درونشهری — دچار مشکل میشوند. میکروموبیلیتی دقیقاً برای پر کردن این خلاء طراحی شده است؛ دستگاههای سبکوزن و با سرعت پایین که در سفرهای کوتاه و تردد در کوچهها و خیابانهای باریک شهر عالی عمل میکنند. با این حال، دستیابی به خودمختاری واقعی در حوزه میکروموبیلیتی همچنان یک چالش بزرگ است. راهحلهای هوش مصنوعی کنونی معمولاً به صورت جزئی و محدود عمل میکنند، مثلاً فقط بر روی اجتناب از موانع ساده یا ناوبری خطی تمرکز دارند. آنها قادر به درک و پاسخگویی به چالشهای پیچیده و چندوجهی محیطهای واقعی شهری نیستند، چالشهایی که شامل سطوح ناهموار، پلهها، رمپها، و از همه مهمتر، جمعیتهای انسانی متراکم و با رفتارهای غیرقابل پیشبینی میشود.
***
این ناتوانی در مواجهه با پیچیدگیهای دنیای واقعی، پیشرفت به سمت رباتهای میکروموبیلیتی کاملاً خودران را به شدت کند کرده است. رباتها نیاز به قابلیتهایی فراتر از تشخیص ساده اشیاء دارند؛ آنها باید بتوانند قصد حرکت عابران پیاده را پیشبینی کنند، در میان ازدحام با احتیاط حرکت کنند و در عین حال، به مقررات محلی و تعاملات اجتماعی احترام بگذارند. همچنین، تغییرات آب و هوایی، شرایط نوری مختلف، و وجود انواع مختلف موانع شهری (مانند سازههای موقت، چاله آب، یا زبالهها) همگی به این چالشها میافزایند. این معضلات، ضرورت وجود پلتفرمهای شبیهسازی بسیار پیشرفته را که بتوانند این جزئیات و پیچیدگیها را با دقت بیسابقهای مدلسازی کنند، برجسته میسازد تا رباتها بتوانند در یک محیط کنترلشده و ایمن، آموزشهای جامع و واقعبینانهای را پشت سر بگذارند.
محدودیتهای پلتفرمهای موجود یادگیری و شبیهسازی ربات
اکثر پلتفرمهای شبیهسازی که امروزه برای آموزش رباتها در دسترس هستند، عمدتاً برای محیطهای داخلی کنترلشده یا شبکههای جادهای متمرکز بر وسایل نقلیه بزرگ طراحی شدهاند. این پلتفرمها فاقد جزئیات بافتی و پیچیدگیهای خاصی هستند که در فضاهای شهری منحصر به فرد میکروموبیلیتی — نظیر پیادهروهای پرپیچوخم، میدانهای عمومی شلوغ، و کوچههای باریک با سطوح متنوع — یافت میشود. علاوه بر این، بسیاری از پلتفرمهای شبیهسازی با هدف ارائه کارایی بالا، صحنههای بسیار سادهشدهای را ارائه میدهند که برای انجام یادگیری عمیق در محیطهایی با موانع پویا و غیرقابل پیشبینی بودن حرکات عابران پیاده، کافی نیستند. این شکاف عمیق، به طور مستقیم، توانایی عوامل هوش مصنوعی را برای یادگیری مهارتهای حیاتی و پیچیده مورد نیاز برای میکروموبیلیتی خودران را محدود میکند.
***
جمعآوری دادههای آموزشی از دنیای واقعی برای پوشش دادن تمام سناریوهای ممکن در محیطهای شهری، نه تنها عملیاتی پرهزینه و زمانبر است، بلکه میتواند با خطرات ایمنی نیز همراه باشد. این امر باعث میشود که شبیهسازیهای دقیق به عنوان جایگزینی امنتر و مقیاسپذیرتر اهمیت یابند. با این حال، پلتفرمهای فعلی اغلب در شبیهسازی دقیق تعاملات فیزیکی رباتها با محیط، مانند دینامیکهای برخورد با موانع کوچک یا حرکت بر روی سطوح لغزنده، دچار نقص هستند. این نادیده گرفتن جزئیات فیزیکی، منجر به ایجاد “شکاف واقعیت-شبیهسازی” (sim-to-real gap) میشود؛ جایی که مدلهای آموزشدیده در شبیهسازی، عملکرد ضعیفی در دنیای واقعی از خود نشان میدهند. این محدودیتها بر نیاز به توسعه شبیهسازیهایی با وفاداری بالا تأکید دارد که بتوانند این چالشها را به طور کامل برطرف کنند.
***
برای اینکه رباتهای خودران در محیطهای شهری پیچیده به طور مؤثر عمل کنند، باید بتوانند از بین هزاران سناریوی ممکن در کسری از ثانیه تصمیم بگیرند. این شامل تشخیص اشیاء، پیشبینی حرکات انسان، برنامهریزی مسیرهای امن و اجتناب از تصادفات است. پلتفرمهای موجود به دلیل کمبود تنوع در سناریوها و عدم دقت در شبیهسازی فیزیک، نمیتوانند این تواناییهای پیچیده را به طور کامل پرورش دهند. این مسائل، لزوم ایجاد یک شبیهساز جدید را که بتواند این نارساییها را برطرف کند، بیش از پیش آشکار میسازد و راه را برای نسل بعدی رباتهای خودران شهری هموار میکند.
معرفی URBAN-SIM: شبیهسازی با کارایی بالا برای میکروموبیلیتی شهری
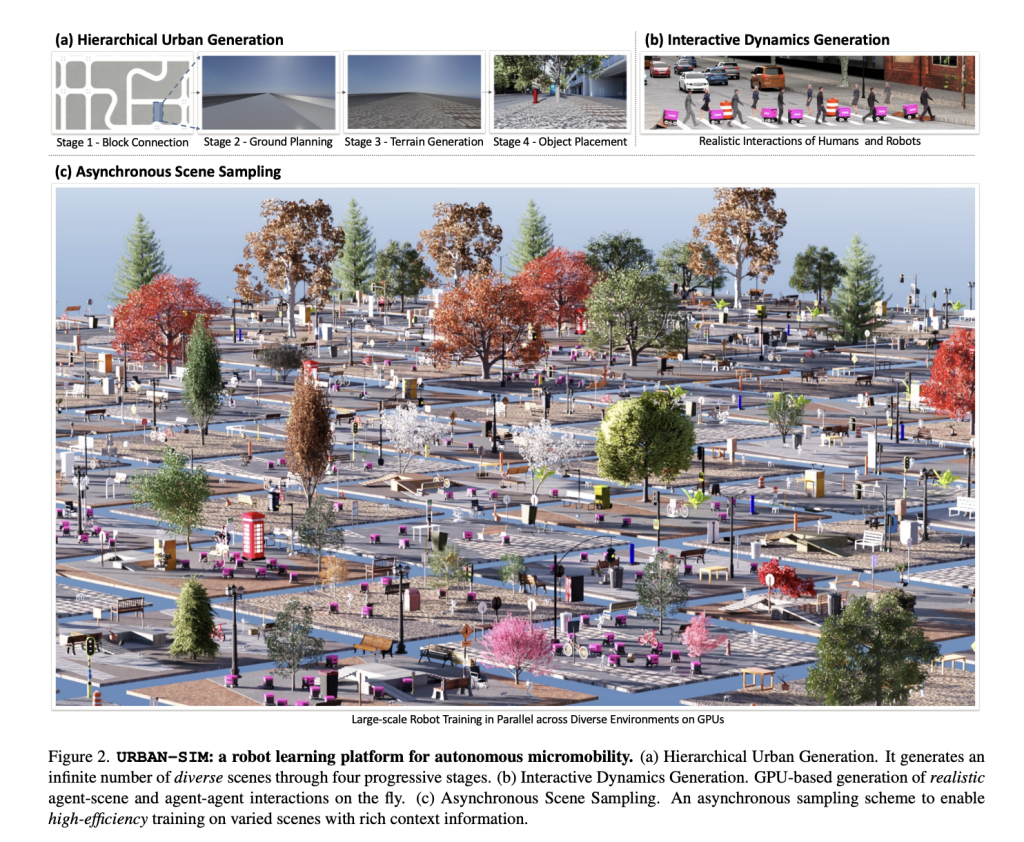
در پاسخ به این چالشهای مبرم، محققانی از دانشگاه کالیفرنیا، لسآنجلس و دانشگاه واشنگتن، پلتفرم **URBAN-SIM** را توسعه دادهاند. URBAN-SIM یک پلتفرم شبیهسازی شهری مقیاسپذیر و با وفاداری بالا است که به طور خاص برای پیشبرد تحقیقات در زمینه میکروموبیلیتی خودران طراحی شده است. هدف اصلی این پلتفرم، ایجاد محیطهای آموزشی بسیار واقعگرایانه و پیچیده است که به رباتها اجازه میدهد تا مهارتهای حیاتی را در شرایطی بیاموزند که تقلید آنها در دنیای واقعی، هم بسیار دشوار و هم فوقالعاده پرهزینه خواهد بود. این ابزار قدرتمند، گامی مهم در جهت پر کردن شکاف بین نظریه و عمل در زمینه هوش مصنوعی تجسمیافته محسوب میشود.
***
URBAN-SIM بر پایه آخرین فناوریهای شرکت NVIDIA، از جمله Omniverse و موتور فیزیک پیشرفته PhysX، بنا شده است. این زیرساخت مستحکم و پیشرفته، امکان ترکیب رندرینگ بصری بسیار واقعگرایانه را با شبیهسازی فیزیک دقیق فراهم میآورد. این ترکیب منحصربهفرد برای آموزش هوش مصنوعی تجسمیافته (Embodied AI) که نیازمند تعاملات دقیق و واقعی با محیط فیزیکی است، حیاتی است. رباتها در این محیط شبیهسازیشده میتوانند نه تنها محیط را با جزئیات بصری بالا درک کنند، بلکه به صورت فیزیکی نیز با آن تعامل داشته باشند، که برای ناوبری ایمن و کارآمد در محیطهای پیچیده شهری ضروری است. این دقت در شبیهسازی، به توسعهدهندگان کمک میکند تا الگوریتمهای کنترل ربات را با ظرافت بیسابقهای تنظیم کرده و بهینهسازی کنند.
ویژگیهای کلیدی URBAN-SIM: توانمندیهای بینظیر
تولید سلسله مراتبی صحنه شهری برای تنوع بیپایان
URBAN-SIM قادر است به صورت رویهای و خودکار، محیطهای شهری بسیار متنوع و در مقیاس وسیع را تولید کند. این محیطها شامل جزئیات پیچیدهای از بلوکهای خیابانی گرفته تا ویژگیهای دقیقتر زمین مانند پیادهروها، رمپهای شیبدار، پلهها و سطوح ناهموار میشوند. این خط لوله تولید محتوا، یک محیط واقعگرایانه و در عین حال متنوع را برای آموزش رباتها فراهم میآورد. این رویکرد پیشرفته تضمین میکند که هر سناریوی شبیهسازیشده از نظر توپوگرافی و ساختار معماری، کاملاً منحصربهفرد باشد، که این امر به رباتها کمک میکند تا برای ناوبری در طیف گستردهای از شرایط دنیای واقعی آماده شوند و تعمیمپذیری بالایی در رفتار خود نشان دهند.
شبیهسازی عوامل پویا و تعاملی برای دینامیک واقعی
یکی از نقاط قوت برجسته URBAN-SIM، قابلیت آن در شبیهسازی دقیق و بلادرنگ (real-time) عابران پیاده، دوچرخهسواران و وسایل نقلیه دیگر بر روی پردازندههای گرافیکی (GPU) است. این امکان، تعاملات پیچیده چندعاملی را فراهم میکند که به طرز شگفتآوری دینامیکهای واقعی شهری را تقلید میکند. رباتها در این محیط میتوانند یاد بگیرند چگونه به طور ایمن و کارآمد در میان جمعیتهای متحرک، ترافیک وسایل نقلیه و سایر موانع پویا، مسیر خود را بیابند. رفتار این عوامل پویا به گونهای طراحی شده است که نه تنها طبیعی و غیرقابل پیشبینی باشد، بلکه شامل واکنشهای منطقی به حضور و حرکت ربات نیز میشود، که تجربه آموزشی را برای رباتهای خودران بسیار غنیتر میسازد.
نمونهبرداری نامتقارن صحنه برای افزایش چشمگیر مقیاسپذیری و کارایی
این پلتفرم از یک استراتژی نوآورانه نمونهبرداری نامتقارن صحنه بهره میبرد که امکان آموزش موازی عوامل هوش مصنوعی را در صدها صحنه شهری منحصربهفرد و پیچیده بر روی یک پردازنده گرافیکی واحد فراهم میآورد. این ویژگی انقلابی، سرعت آموزش را به طور چشمگیری افزایش میدهد و به یادگیری سیاستهای کنترلی قوی و مقاوم در رباتها کمک میکند. با این روش، رباتها میتوانند در کسری از زمان مورد نیاز برای روشهای سنتی، حجم عظیمی از تجربه را کسب کنند، که برای دستیابی به سطوح بالای خودمختاری و آمادگی برای استقرار در دنیای واقعی ضروری است. مقیاسپذیری URBAN-SIM تضمین میکند که حتی پیچیدهترین و بزرگترین مدلهای هوش مصنوعی نیز میتوانند به طور موثر در محیطهای شبیهسازیشده آموزش ببینند و به عملکرد بهینه دست یابند.
URBAN-BENCH: مجموعه بنچمارک جامع برای ارزیابی مهارتهای دنیای واقعی
تکمیلکننده پلتفرم URBAN-SIM، ابزاری قدرتمند به نام **URBAN-BENCH** است. این مجموعه جامع از وظایف و چارچوب بنچمارک، قابلیتهای اساسی مورد نیاز برای میکروموبیلیتی خودران را، که مستقیماً بر اساس سناریوهای واقعی استفاده در محیطهای شهری طراحی شدهاند، ارزیابی میکند. URBAN-BENCH شامل سه دسته اصلی از وظایف است که هر یک جنبههای مهم و چالشبرانگیز ناوبری ربات در محیطهای پیچیده شهری را پوشش میدهند و برای ارزیابی جامع تواناییهای ربات ضروری هستند. این بنچمارک به توسعهدهندگان کمک میکند تا عملکرد رباتهای خود را در برابر استانداردهای واقعی بسنجند.
وظایف حرکت در شهر (Urban Locomotion Tasks): پایه و اساس ناوبری
این دسته از وظایف، بر توانایی ربات در حرکت و حفظ پایداری بر روی انواع مختلف سطوح تمرکز دارد. این شامل پیمایش بر روی سطوح صاف، شیبدار (رمپها)، پلهها و زمینهای ناهموار است که برای اطمینان از حرکت پایدار و کارآمد ربات در هر محیطی طراحی شدهاند. رباتها باید توانایی خود را در حفظ تعادل، کنترل سرعت و جهتگیری بر روی انواع مختلف سطوح نشان دهند. این بخش از بنچمارک، به طور خاص بر تواناییهای فیزیکی و مکانیکی ربات در غلبه بر چالشهای محیطی تأکید دارد، از جمله توانایی بالا رفتن و پایین آمدن از پلهها یا حرکت روی سطوح لغزنده و غیرمنتظره که در خیابانها و پیادهروهای شهری معمول است.
وظایف ناوبری شهری (Urban Navigation Tasks): تصمیمگیری هوشمندانه در میان موانع
این وظایف بر توانایی ربات در ناوبری هوشمندانه و ایمن در مسیرهای باز، اجتناب از موانع ثابت و مدیریت موانع پویا تمرکز دارند. رباتها باید بتوانند از موانع ثابت مانند نیمکتها، سطلهای زباله، تابلوهای خیابان و سایر عناصر شهری اجتناب کنند، در حالی که همزمان با موانع پویا نظیر عابران پیاده، دوچرخهسواران و حتی خودروهای دیگر که در حال حرکت یا توقف ناگهانی هستند، تعامل ایمن داشته باشند. این بخش از بنچمارک، تواناییهای ادراکی، پیشبینی و تصمیمگیری سریع ربات را در شرایط پیچیده و در حال تغییر شهری ارزیابی میکند، جایی که نیاز به واکنش سریع و دقیق به محیط اطراف وجود دارد تا از تصادفات جلوگیری شود.
وظیفه عبور از شهر (Urban Traverse Task): آزمون نهایی استقامت و هوش
این وظیفه، یک سفر چالشبرانگیز و بلندمدت در مقیاس کیلومتر است که ترکیبی پیچیده از زمینهای ناهموار، موانع ثابت و متحرک، و حضور پرتعداد عوامل پویا را شامل میشود. این وظیفه برای آزمایش قابلیتهای ناوبری طولانیمدت، استقامت ربات و تواناییهای پیشرفته تصمیمگیری آن در شرایط دشوار طراحی شده است. این بخش از بنچمارک، توانایی ربات را در مدیریت سناریوهای ترکیبی و پایدار در طول زمان ارزیابی میکند و نشان میدهد که ربات تا چه حد میتواند در محیطهای واقعی و طولانیمدت به صورت خودران و بدون نیاز به مداخله عمل کند. این وظیفه، یک آزمون نهایی و جامع برای تمام تواناییهای کلی ربات در محیطهای شهری پیچیده به شمار میرود و آمادگی آن را برای استقرار واقعی میسنجد.
رویکرد خودمختاری مشترک انسان و هوش مصنوعی: تعادل بین کنترل و خودکارسازی
برای وظیفه ناوبری طولانیمدت در شهر، URBAN-BENCH یک مدل نوآورانه **خودمختاری مشترک انسان و هوش مصنوعی** را معرفی میکند. این معماری کنترل انعطافپذیر، سیستم کنترل ربات را به لایههای مختلفی — شامل تصمیمگیری سطح بالا (مانند انتخاب مقصد نهایی)، ناوبری سطح میانی (مانند برنامهریزی مسیر محلی) و حرکت سطح پایین (مانند کنترل دقیق چرخها و مفاصل) — تجزیه میکند. این ساختار لایهای اجازه میدهد تا انسانها در سناریوهای خاص، به ویژه آنهایی که بسیار پیچیده، غیرمنتظره یا با ریسک بالا هستند، مداخله کنند و کنترل را در دست بگیرند. در مقابل، هوش مصنوعی وظایف ناوبری و حرکتهای معمول و روتین را به صورت خودکار مدیریت میکند. این همکاری پویا بین انسان و هوش مصنوعی، تعادلی بهینه بین ایمنی و کارایی در محیطهای پویای شهری ایجاد میکند.
***
این رویکرد ترکیبی، مزایای متعددی را به همراه دارد و موانع موجود در استقرار کامل رباتهای خودران را کاهش میدهد. از یک سو، با بهرهگیری از هوش و تجربه انسانی در مواقع بحرانی، به طور قابل توجهی ایمنی عملیات ربات افزایش مییابد. انسان قادر است تصمیماتی را بگیرد که هوش مصنوعی هنوز قادر به درک کامل پیچیدگیهای آنها نیست، یا در شرایطی که دادههای کافی برای تصمیمگیری خودکار وجود ندارد، راهنماییهای لازم را ارائه دهد. این امر به خصوص در سناریوهای “لبه” که در دنیای واقعی رخ میدهند و مدلهای هوش مصنوعی ممکن است برای آنها آموزش ندیده باشند، بسیار حیاتی است. از سوی دیگر، با واگذاری وظایف روتین و تکراری به هوش مصنوعی، کارایی و سرعت عملیات بهبود مییابد و بار کاری بر روی اپراتورهای انسانی به شکل قابل توجهی کاهش مییابد، که این خود به بهبود بهرهوری کلی سیستم کمک میکند.
***
علاوه بر این، مدل خودمختاری مشترک، فضایی برای یادگیری و بهبود مستمر سیستم هوش مصنوعی فراهم میآورد. با هر بار مداخله انسانی، سیستم هوش مصنوعی میتواند از آن تجربه درس بگیرد و مدلهای تصمیمگیری خود را بهینهسازی کند. این چرخه بازخورد مثبت به سمت ایجاد یک سیستم کاملاً خودرانتر با قابلیتهای تصمیمگیری پیشرفتهتر و مستقلتر پیش میرود، در حالی که در مراحل اولیه توسعه و استقرار، ایمنی را تضمین میکند. این رویکرد نوآورانه، نه تنها به حل مشکلات فنی پیچیده کمک میکند، بلکه به پذیرش اجتماعی گستردهتر فناوریهای خودران نیز یاری میرساند، زیرا اطمینان میدهد که انسانها همچنان کنترل نهایی و امکان مداخله در مواقع لزوم را در دست دارند.
ارزیابی عملکرد رباتهای متنوع در وظایف واقعگرایانه
پلتفرمهای URBAN-SIM و URBAN-BENCH برای پشتیبانی از طیف وسیعی از پلتفرمهای رباتیک طراحی شدهاند. این قابلیت شامل ارزیابی رباتهای چرخدار، چهارپا، چرخدار-پا (ترکیبی از چرخ و پا) و حتی رباتهای انساننما میشود. نتایج حاصل از بنچمارکها، نقاط قوت و ضعف منحصر به فرد هر نوع ربات را در مواجهه با چالشهای حرکت و ناوبری شهری به وضوح نشان میدهد، که این امر تعمیمپذیری و انعطافپذیری بالای پلتفرم را به تصویر میکشد. این آزمایشات جامع و مقایسهای، اطلاعات حیاتی را برای محققان و مهندسان فراهم میآورد تا بتوانند پلتفرم رباتیک مناسب را برای کاربردهای خاص خود انتخاب کنند.
***
برای مثال، تجزیه و تحلیل عملکرد نشان میدهد که رباتهای چهارپا، به دلیل طراحی مکانیکی و تواناییهای تعادل ذاتی خود، در حفظ پایداری و عبور از موانع پیچیدهای مانند پلهها و سطوح بسیار ناهموار، برتری قابل توجهی دارند. طراحی مفصلی پاهای آنها به این رباتها اجازه میدهد تا با موانع عمودی و تغییرات ناگهانی در ارتفاع سطح، به خوبی کنار بیایند. در مقابل، رباتهای چرخدار، در مسیرهای صاف و بدون مانع بهترین عملکرد را از خود نشان میدهند، جایی که سرعت، کارایی انرژی و حرکت روان آنها به حداکثر میرسد. آنها برای حرکت در پیادهروهای آسفالتشده یا خیابانهای هموار ایدهآل هستند، اما در مواجهه با پلهها یا زمینهای بسیار ناهموار، کارایی خود را از دست میدهند.
***
رباتهای چرخدار-پا، که از یک طراحی هیبریدی بهره میبرند، قابلیتهای هر دو نوع را ترکیب میکنند. آنها میتوانند از چرخها برای حرکت سریع و کارآمد بر روی سطوح صاف استفاده کنند و در عین حال، در صورت نیاز از پاها برای غلبه بر موانع یا حرکت در زمینهای دشوار بهره ببرند. این انعطافپذیری آنها را برای محیطهای شهری که ترکیبی از سطوح مختلف را دارند، بسیار مناسب میسازد. از سوی دیگر، رباتهای انساننما، با تواناییهای شگفتانگیز خود در تقلید حرکات انسانی، قادرند در فضاهای باریک و شلوغ شهری با حرکت از پهلو (سایدستپ) یا با احتیاط در میان جمعیت، به طور مؤثر ناوبری کنند. این ارزیابیهای جامع، به محققان کمک میکند تا ربات مناسب را برای هر کاربرد خاص انتخاب کنند و ویژگیهای مورد نیاز برای بهبود عملکرد رباتها در محیطهای پیچیده را شناسایی کنند. این بینشها برای طراحی نسل بعدی رباتهای خودران شهری که بتوانند در سناریوهای متنوع و غیرقابل پیشبینی شهری عمل کنند، بسیار ارزشمند است.
مقیاسپذیری و کارایی آموزش: کلید دستیابی به خودمختاری مقاوم
استراتژی نوآورانه نمونهبرداری نامتقارن صحنه در URBAN-SIM، امکان آموزش عوامل هوش مصنوعی را در طیف وسیعی از محیطهای شهری متنوع فراهم میآورد. این روش، بهبود عملکرد قابل توجهی تا ۲۶.۳% را نسبت به روشهای آموزش همزمان نشان میدهد. این بدان معناست که با استفاده از URBAN-SIM، میتوان رباتها را با سرعت بیشتری آموزش داد و به آنها امکان یادگیری از سناریوهای بسیار متنوعتری را داد. افزایش تنوع در محیطهای آموزشی به طور مستقیم با نرخ موفقیت بالاتر در وظایف ناوبری همبستگی دارد، که این خود بر ضرورت استفاده از شبیهسازیهای مقیاسپذیر و متنوع برای توسعه سیستمهای میکروموبیلیتی خودران و مقاوم تأکید میکند. این یافتهها، اهمیت داشتن یک پایگاه داده بزرگ و پویا از محیطهای آموزشی را برجسته میسازد.
***
این رویکرد، به رباتها کمک میکند تا تعمیمپذیری (generalizability) بسیار بالایی کسب کنند؛ به این معنی که آنها قادر خواهند بود مهارتهای آموختهشده در محیطهای شبیهسازی را به شرایط ناشناخته و غیرمنتظره در دنیای واقعی به طور مؤثر منتقل کنند. این نه تنها باعث کاهش زمان و هزینه توسعه و آزمایش میشود، بلکه به طور چشمگیری ایمنی و قابلیت اطمینان سیستمهای خودران را در محیطهای واقعی افزایش میدهد. هرچه تنوع و پیچیدگی سناریوهای آموزشی بیشتر باشد، ربات بهتر میتواند با شرایط پیشبینینشده، مانند تغییرات ناگهانی در ترافیک، ظاهر شدن موانع جدید یا حتی تغییرات آب و هوایی، سازگار شود و تصمیمات ایمن و کارآمد بگیرد. این توانایی سازگاری، برای استقرار موفقیتآمیز میکروموبیلیتی خودران در شهرهای هوشمند آینده، حیاتی است.
***
کارایی آموزش، همچنین به معنای استفاده بهینه از منابع محاسباتی و زمان توسعه است. با قابلیت آموزش موازی بر روی یک GPU واحد، URBAN-SIM امکان میدهد تا توسعهدهندگان به سرعت ایدههای جدید را آزمایش کرده و مدلهای خود را تکرار کنند. این شتاب در چرخه توسعه، به پیشرفت سریعتر و نوآوری مداوم در زمینه هوش مصنوعی تجسمیافته و میکروموبیلیتی خودران منجر میشود. این دستاوردها گامی بلند در جهت تحقق چشمانداز شهرهای هوشمند است، جایی که رباتهای خودران نقش مهمی در حملونقل، تحویل کالا و خدمات مختلف شهری ایفا خواهند کرد. URBAN-SIM راه را برای آیندهای هموارتر و هوشمندتر برای حملونقل شهری باز میکند.
نتیجهگیری و جهتگیریهای آینده: گامهای بعدی به سوی خودمختاری کامل
پلتفرمهای URBAN-SIM و URBAN-BENCH گامهای اساسی و حیاتی در مسیر فعالسازی میکروموبیلیتی خودران ایمن، کارآمد و مقیاسپذیر در محیطهای پیچیده شهری محسوب میشوند. این تحقیقات بنیادین، زیربنای لازم برای توسعه نسل بعدی رباتهای خودران را فراهم میآورند. در حال حاضر، کارهای آینده بر روی ایجاد یک پل مستحکم بین محیط شبیهسازی و استقرار واقعی رباتها در دنیای فیزیکی متمرکز شده است. این امر از طریق یکپارچهسازی با ROS 2 (سیستم عامل ربات) و توسعه تکنیکهای پیشرفته انتقال از شبیهسازی به واقعیت (sim-to-real transfer techniques) دنبال میشود. هدف نهایی این بخش، تضمین این است که قابلیتهای آموختهشده توسط ربات در محیط مجازی، به طور موثر و قابل اعتمادی در دنیای واقعی قابل اجرا باشند.
***
علاوه بر این، نقشه راه توسعه پلتفرم شامل تکامل آن برای دربرگرفتن قابلیتهای ادراک چندوجهی و دستکاری پیچیده است. این به معنای تجهیز رباتها به حسگرهای پیشرفتهتر (مانند لیدار، رادار، و دوربینهای سهبعدی) و تواناییهای فیزیکی برای انجام وظایف پیچیدهتر، فراتر از ناوبری ساده است. این قابلیتها برای کاربردهای جامع رباتهای شهری مانند تحویل بسته به منازل (که ممکن است نیاز به باز کردن در یا بالا رفتن از پلهها داشته باشند) و رباتیک کمکی (مانند ویلچرهای خودران یا رباتهایی که به افراد مسن کمک میکنند) ضروری است. این تکامل به رباتها امکان میدهد تا به طور کامل در بافت شهری ادغام شوند و خدمات گستردهتری را ارائه دهند.
***
در نهایت، با فعالسازی آموزش و بنچمارکینگ مقیاسپذیر و دقیق عوامل هوش مصنوعی تجسمیافته در سناریوهای واقعی شهری، این تحقیق عظیم، پیشرفت در زمینه میکروموبیلیتی خودران را به طور بیسابقهای تسریع میبخشد. این نوآوریها نه تنها به توسعه پایدار شهری کمک میکنند، بلکه دسترسی به حملونقل را برای گروههای مختلف اجتماعی بهبود میبخشند و به طور چشمگیری ایمنی را در فضاهای عمومی افزایش میدهند. این پروژه نه تنها یک پیشرفت تکنولوژیکی است، بلکه یک گام مهم به سوی ساخت شهرهای هوشمندتر، کارآمدتر و انسانیتر برای نسلهای آینده است، جایی که رباتها به عنوان همراهان ایمن و قابل اعتماد در زندگی روزمره ما عمل خواهند کرد.
**منبع مقاله:**
مقاله و کد. (تمام اعتبار این تحقیق به محققان این پروژه تعلق دارد. هماکنون در خبرنامه هوش مصنوعی ما عضو شوید!)